自动驾驶应用
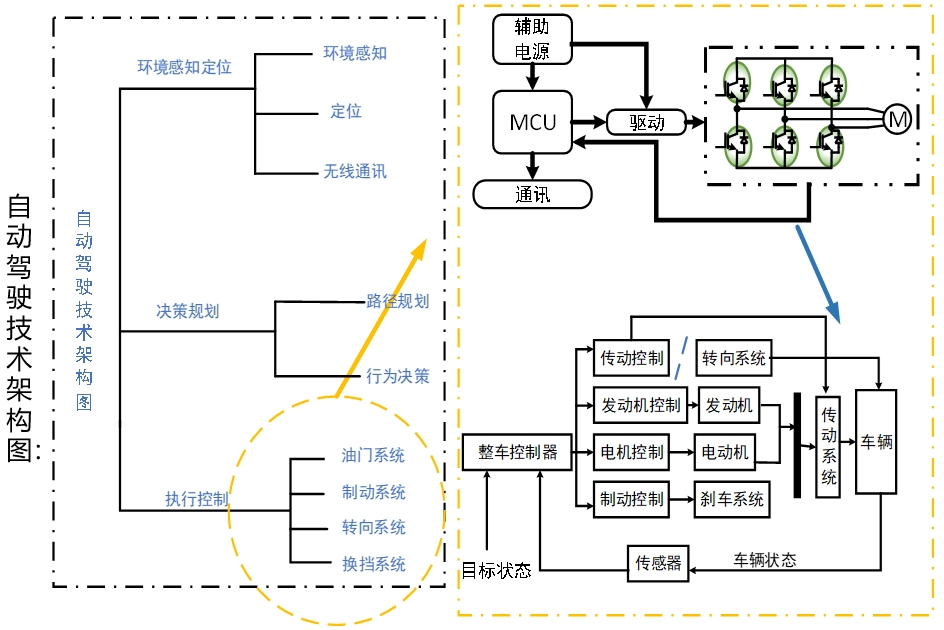
自动驾驶技术分为3个核心的流程,分别是环境感知定位、决策规划和执行控制。执行系统是指系统做出决策规划以后,替代驾驶员对车辆进行控制,反馈到底层模块执行任务。车辆的各个操控系统需要通过总线与决策系统相连接,并能够按照决策系统发出的总线指令精确地控制加速程度、制动程度、转向幅度、灯光控制等驾驶动作,以实现车辆的自主驾驶。采用油门和制动综合控制的方法来实现对预定车速的跟踪,各种电机-发动机-传动模型、汽车运行模型和刹车过程模型与不同的控制算法相结合,控制汽车自动保持期望的行车路线,并在不同的车速、载荷、风阻、路况下均有很好的乘坐舒适性和稳定性。美浦森的SGT MOS常用于开关电源、电机驱动、BMS等领域。选用美浦森的SGT MOS用在执行控制系统中,可实现较高的转换效率,优化产品性能。
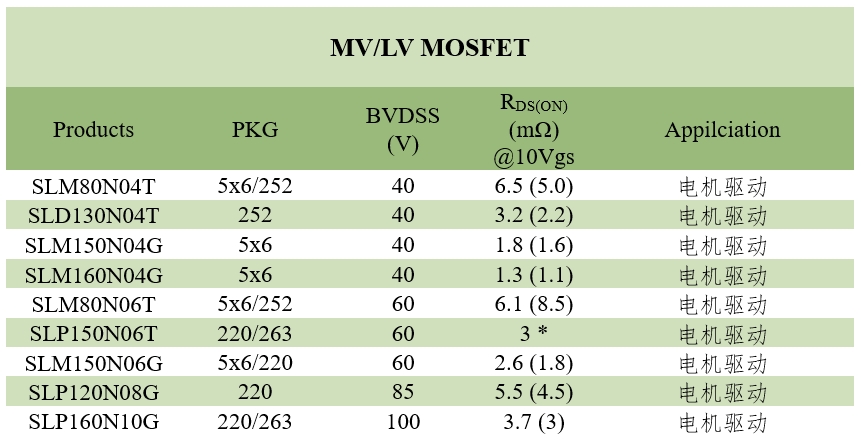
推荐产品